人間中心的な人工知能(HCAI) (1)
ここ数年注目されている潮流が、人間中心的な人工知能HCAI (Human Centered AI)である。今回は、システム制御に関する人間の位置を考える枠組みとしてのHITL、HOTL、HOOTLという概念の整理を行いたい。
人工知能や機械学習の新しい潮流
ChatGPTの登場により改めて注目を浴びている人工知能AI (Artificial Intelligence)や機械学習ML (Machine Learning)だが、それに関連して、ここ数年注目されている潮流がある。それが人間中心的な人工知能、HCAI (Human Centered AI)あるいはHAI (Human centered AI)である。これはAIをスレーブ(直訳すると奴隷となるが、主人のことを補佐する人、程度の意味である)として使ってマスター(スレーブに対する主人ということになる)である人間の能力を向上させようとする潮流であり、「2001年宇宙の旅」にでてきたHALのように、人間に代わって動作する自律的なAI (autonomous AI)とは区別されるものである。
なお、HCAIという略語には、院内感染などの医療関連感染HCAI (Health Care-Associated Infection)という用語などがあるようだが、本稿ではHCDとの関連性を強調するために紛らわしいがHCAIと呼ぶことにしたい。ちなみにHAIの方はスタンフォード大学の研究組織が使っていたりする。
今回はシステム制御に関する人間の位置を考える枠組みとしてのHITL、HOTL、HOOTLという概念の整理を行った後に、次の回で一連の論文や著書で活動的にHCAIを論じているシュナイダーマン(Shneiderman, B.)と、最近HCAIに関する具体的なアプローチを提唱しているシュー(Xu, W.)の考え方を紹介したい。シュナイダーマンは、HCAIシステムはどうあるべきかというシステムのあり方を論じており、シューは、そうしたシステムの開発の進め方を論じている。
システムと人間による制御
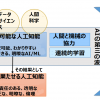
世の中にはさまざまなシステムがあるが、人間による制御という観点から見たときには、HITL (Human in the Loop)、HOTL (Human on the Loop)、HOOTL (Human Out of the Loop)が区別される。HITLは、人間がシステムの処理のループに組み込まれていて動作のトリガーはあくまでも人間が行うものである。HOTLは、ほとんどの情報処理をシステムが行う自律的なものである。しかし、何時でも人間による介入が受け付けられる。HOOTLは、人間の承認や意思決定なしにシステムが自律的に処理を行うものである。HOTLとHOOTLは、HITLと比べるとあまり見かけない略語ではあるが、軍事的な場面について三種類のシステムについて論じたブログがある。なおHuman Out of the LoopをHOTLと略す場合もある。
自動車の自動運転は、運転自動化を行わないレベル0は従来のままであり、HITLである。自動ブレーキのような運転支援を行うレベル1もHITLといえるだろう。車線を維持しながら前車について走るような部分運転自動化のレベル2となると、ドライバーの関与の程度が減り自動化のレベルが進むのでHOTLといえると思う(このあたりの判断については、別途資料があるのかもしれないが、ここは筆者の考えである)。条件付き自動運転であるレベル3や特定条件における完全自動運転のレベル4も、ドライバーの介入の余地があるのでHOTLといっていいだろう。しかし完全自動運転というレベル5になると、ドライバーの介入余地がどの程度かによって、HOOTLとみなされることもあるだろう。(参考: 自動運転のレベル分けとは?レベル0~5までを一挙解説)
それでは、以下にHITL、HOTL、HOOTLのそれぞれについてみてゆきたい。
HITLシステム
HITLというのは、システム制御のループのなかに人間が含まれている、つまり一般的にみかけるシステム制御の場面をいう。自動車の運転やATMの入出金操作、電子レンジでの調理などが身近では代表的なところだろう。これらのシステムでは、システムの動作、たとえば自動車なら前進するか停止するか、ATMなら欲しい金額を引き出すこと、電子レンジでは料理の温めを開始する、といったことは人間が決定し制御する。また、システムの動作中、それを撤回することも(多くの場合)可能である。
HITLに含めることができるシステムのなかには医療分野で有名な手術用ロボット、ダビンチ(da Vinci)がある。開発したのはアメリカのインテュイティブ・サージカル社で、日本では国立がん研究センターや東京医科大学などで使用されている。
これは従来からあるマジックハンドを高水準化したものといえる。ダビンチのシステムは、40種以上の鉗子を装着でき、270°の可動域をもつ3本のアームと15倍まで拡大した立体映像を撮影できるカメラを搭載したペイシェントカート、立体視で患部を見ながら両手でアームを操作できるサージョンコントロール、それに助手用のモニターを装備したヴィジョンカートの3つのコンポーネントからなっている。ダビンチはHITLシステムの典型例であり、免許をもった執刀医が患部を見ながらアームを操作して手術を行う。執刀医がマスターであり、ダビンチはスレーブの立場である。つまり、あくまでも人間の医師が手術を行うための「道具」なのであり、ダビンチが自分の判断で動作したりすることはない。
また、アームを操作する手振れは吸収できる。利点としては、術中の出血量が少なく、傷口が小さく、術後の痛みが少ないなどがある。ただし執刀医に対しての力覚的フィードバックがないために、注意しないと患部を傷つけてしまうこともあるそうだ。
ダビンチの場合、AIシステムというよりはロボットシステムと受け止めた方がよいが、一般的なAIシステムの場合だと、システムの訓練時にはその性能を人間が確認し評価するし、システムが不適切な動作を行った場合には、そこに介入して適切にアップデートを行う(人間参加型のAI活用(Human-in-the-loop))。
このように、HITLシステムは人間が処理の中心に位置しており、マスター・スレーブ型のHCAIといってもいいだろう。
HOTLシステム
HOTLシステムでは、基本的な処理は自動的に行われ、人間は処理ループの中に含まれてはいない。ただし、システム全体をモニターすることができ、必要と判断したらそこに介入することができる。
ロケットを発射したあとで、そのロケットの自動制御システムで飛ばせていくとしたら、それはHOTLシステムということになるだろう。軌道が逸れてしまったときに人間がロケットを自爆させるという形でHOTLになっていると考えられる。また、ファミリーレストランなどで導入されている配膳ロボットは、オーダーされた料理を客のいる座席まで運ぶが、途中で人にぶつかりそうになると自動的に止まったり方向転換したりする。また動作中、頭部にあるスイッチを叩かれると停止させることもできる。これなどもHOTLといえるだろう。
HOOTLシステム
HOOTLシステムは、系の制御ループから人間が外されてしまっており、システムは人間の介在なしに自動的に環境や状況を認識し、適切と判断された動作を行う。この段階はネガティブな副作用が考えにくいロボット掃除機などが該当するといえるが、そのほとんどがまだ想像の水準にあるといえる。ただ、これまでの研究開発動向を見ていると、AI研究者の活動は、この方向を目指しているように思える。
鉄腕アトムはそうした夢を(ある意味では無反省に)美化したものといえる。アシモフが提起したロボット三原則は、そのような水準になった時のロボットやAIの挙動を人間にとって不都合なものにならないようにするためのものだが、そのような「良心」にしたがって技術が開発されてゆき、倫理的な側面を無視してしまうことはない、と断言することはできるだろうか。自分にだけ都合のいい動作を行うAIを開発する人間がでてこないと言い切れるだろうか。いや、国際的な組織である国連の力不足は明らかになっている現在、このHOOTLレベルのシステムを適切にコントロールするための手段はないといってもいいだろう。HCAIの関係者が危惧しているのは、そうしたHOOTLシステムの暴走なのである。
特に武力行使に関連した領域での自動化の未来は、このまま行くとディストピアの実現につながってしまうだろう。たとえばボストンダイナミクスが開発しているようなロボットに、殺傷能力を付与し、殺傷すべき人物の特徴を教授したら、今すぐにも強力な殺人部隊ができてしまいそうに思える。
HCAIの研究者は、このHOOTLを開発することではなく、あくまでも人間をマスターとして位置づけ、システムの制御ループの中に人間を含むこと、すなわちHITLシステムを開発することを目指している。そのなかで、システムは人間の能力を増強し、判断に必要な情報を提供し、人間の決断を補佐する役割を担う。したがって、結果の責任は人間が負うことになる。
自動運転車について一頃、事故が起きた場合の責任の所在が議論になっていたが、HCAIの立場からすれば、HITLレベルのシステムで事故が起きた場合の責任はAIシステムやそれを開発したメーカーにあるのではなく、そのシステムを利用した人間にあると考えるべきだ、ということになろう。ただ、もちろんグレーな領域はある。たとえばHOTLレベルに相当する自動ブレーキの機能は、注意が散漫になったり意識水準の低下したドライバーを補助する点で有益である。この場合、ドライバーはマスターとして機能しておらず、AIに主導権があるが、ドライバーは、そして他車や歩行者などは、その恩恵を被ることになる。これはありがたい機能ではあるが、それでも事故が発生した場合には、人間のドライバーが責任をとるべきだろう。
いわんやHOOTLであるレベル5の完全自動運転は、ある意味では理想の車ということになる。ドライバーは運転をせずに寝ていることもできるし、他の人たちと酒盛りをすることもできそうに思えてしまう。しかし、AIは完璧なものではない。万一の事態で事故がおきることもありうる。そして、その可能性を考えると心配になって、結局ドライバーは緊張を強いられてしまうことになるかもしれない。もちろん、人間がどのような状況でどのような判断を下すかというデータを多数蓄積すれば、人間程度には事故回避ができるようになる可能性はある。しかし、レベル5の完全自動運転をどのように社会に位置付けるか、ドライバーの責任をどのように明確にするか等の課題があり、そういった社会的合意を求めるのはHCAIの視点で行うべきであり、その議論なしにAIの技術的進歩だけを追求するのは間違っているというべきだろう。
記事で述べられている意見・見解は執筆者等のものであり、株式会社イードの公式な立場・方針を示すものではありません。